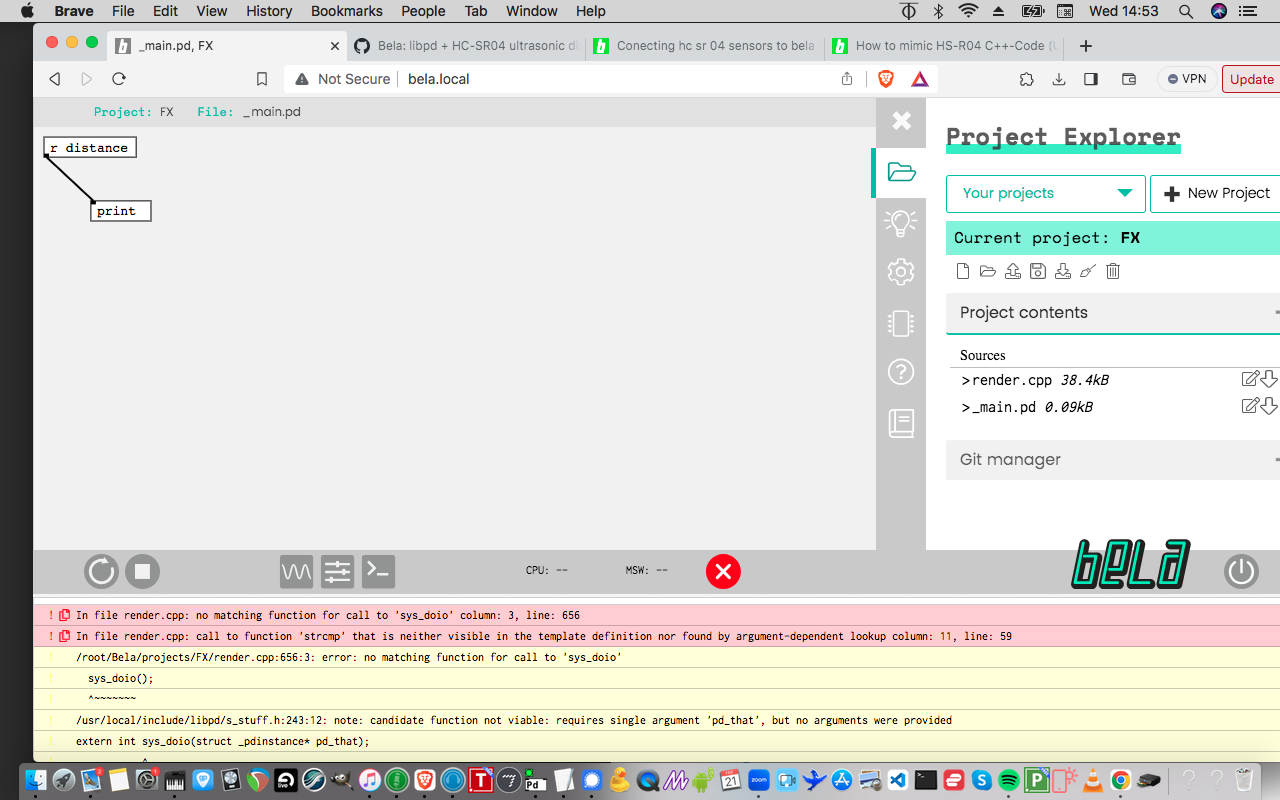
the file that you referred to as
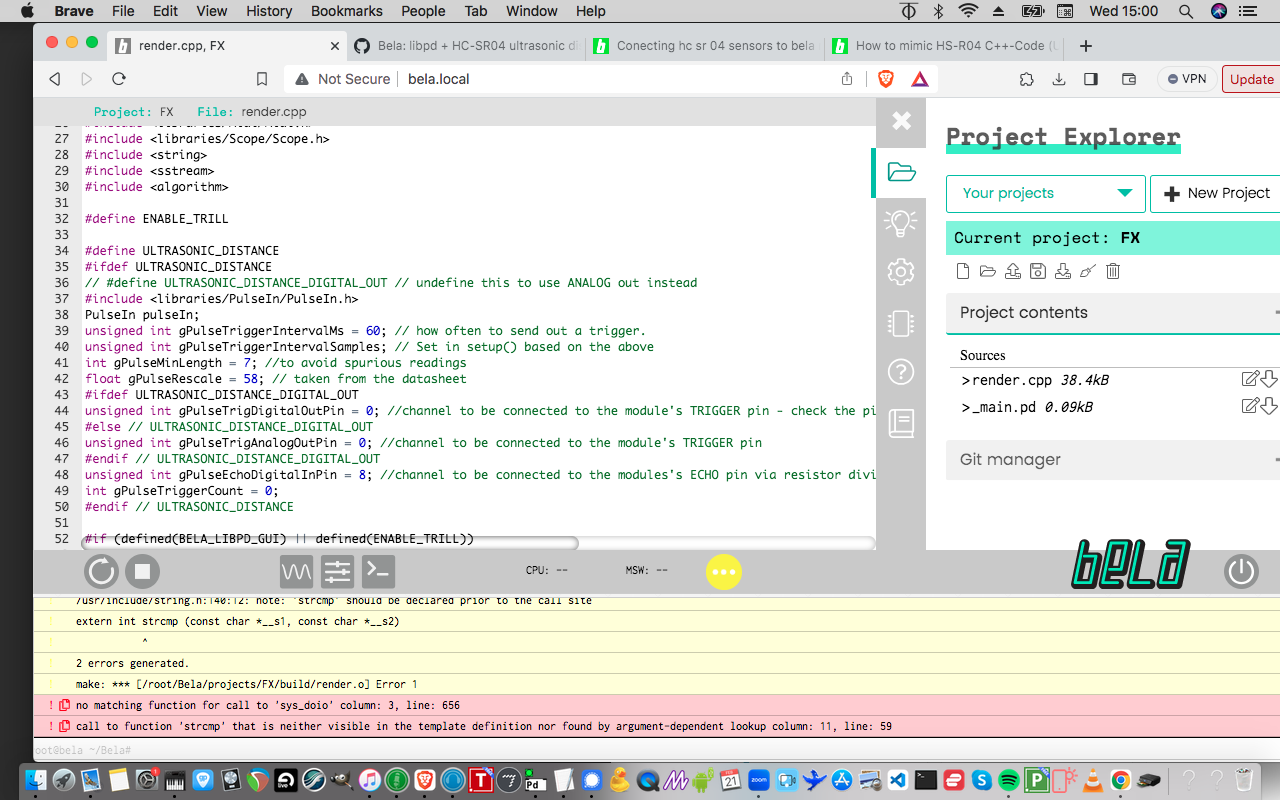
brings up with a bunch of errors despite that I believe it's configured the way I need( d0 d1 output input although it also uses d2 and d3 )I would need to deactivate those so that I can use for other purposes. any reason this one you believe why this one is not working here is the full error messages:
In file ./include/legacy/UdpServer.h: [warning] You included file UdpServer.h. This is now deprecated. You should instead use #include <libraries/UdpServer/UdpServer.h> [-W#warnings] column: 2, line: 2
In file ./include/legacy/Midi.h: [warning] You included file Midi.h. This is now deprecated. You should instead use #include <libraries/Midi/Midi.h> [-W#warnings] column: 2, line: 2
In file ./include/legacy/Scope.h: [warning] You included file Scope.h. This is now deprecated. You should instead use #include <libraries/Scope/Scope.h> [-W#warnings] column: 2, line: 2
In file ./include/legacy/PulseIn.h: [warning] You included file PulseIn.h. This is now deprecated. You should instead use #include <libraries/PulseIn/PulseIn.h> [-W#warnings] column: 2, line: 2
no member named 'init' in 'PulseIn' column: 13, line: 317
no member named 'init' in 'PulseIn' column: 14, line: 319
In file included from /root/Bela/projects/pd3/render.cpp:15:
./include/legacy/UdpServer.h:2:2: warning: You included file UdpServer.h. This is now deprecated. You should instead use #include <libraries/UdpServer/UdpServer.h> [-W#warnings]
#warning You included file UdpServer.h. This is now deprecated. You should instead use #include <libraries/UdpServer/UdpServer.h>
^
In file included from /root/Bela/projects/pd3/render.cpp:16:
./include/legacy/Midi.h:2:2: warning: You included file Midi.h. This is now deprecated. You should instead use #include <libraries/Midi/Midi.h> [-W#warnings]
#warning You included file Midi.h. This is now deprecated. You should instead use #include <libraries/Midi/Midi.h>
^
In file included from /root/Bela/projects/pd3/render.cpp:17:
./include/legacy/Scope.h:2:2: warning: You included file Scope.h. This is now deprecated. You should instead use #include <libraries/Scope/Scope.h> [-W#warnings]
#warning You included file Scope.h. This is now deprecated. You should instead use #include <libraries/Scope/Scope.h>
^
In file included from /root/Bela/projects/pd3/render.cpp:22:
./include/legacy/PulseIn.h:2:2: warning: You included file PulseIn.h. This is now deprecated. You should instead use #include <libraries/PulseIn/PulseIn.h> [-W#warnings]
#warning You included file PulseIn.h. This is now deprecated. You should instead use #include <libraries/PulseIn/PulseIn.h>
^
4 warnings generated.
/root/Bela/projects/pd3/render.cpp:317:13: error: no member named 'init' in 'PulseIn'
pulseIn.init(context, gEchoDigitalInPin, HIGH);
/root/Bela/projects/pd3/render.cpp:319:14: error: no member named 'init' in 'PulseIn'
pulseIn2.init(context, gEchoDigitalInPin2, HIGH);
~~~~~~~~ ^
2 errors generated.
make: *** [/root/Bela/projects/pd3/build/render.o] Error 1