My code is basically this:
#define VERBOSE
int main(int argc, char** argv)
{
// Button (GPIO)
if (gpioInitialise() < 0) {
return 1;
}
gpioSetMode(GPIO_START_BUTTON, PI_INPUT);
gpioSetPullUpDown(GPIO_START_BUTTON, PI_PUD_UP);
gpioSetMode(GPIO_TRILL_RESET, PI_OUTPUT);
gpioWrite(GPIO_TRILL_RESET, 1);
usleep(1000);
gpioWrite(GPIO_TRILL_RESET, 0);
// Wait until Trill has finished booting
usleep(600000);
// Trill
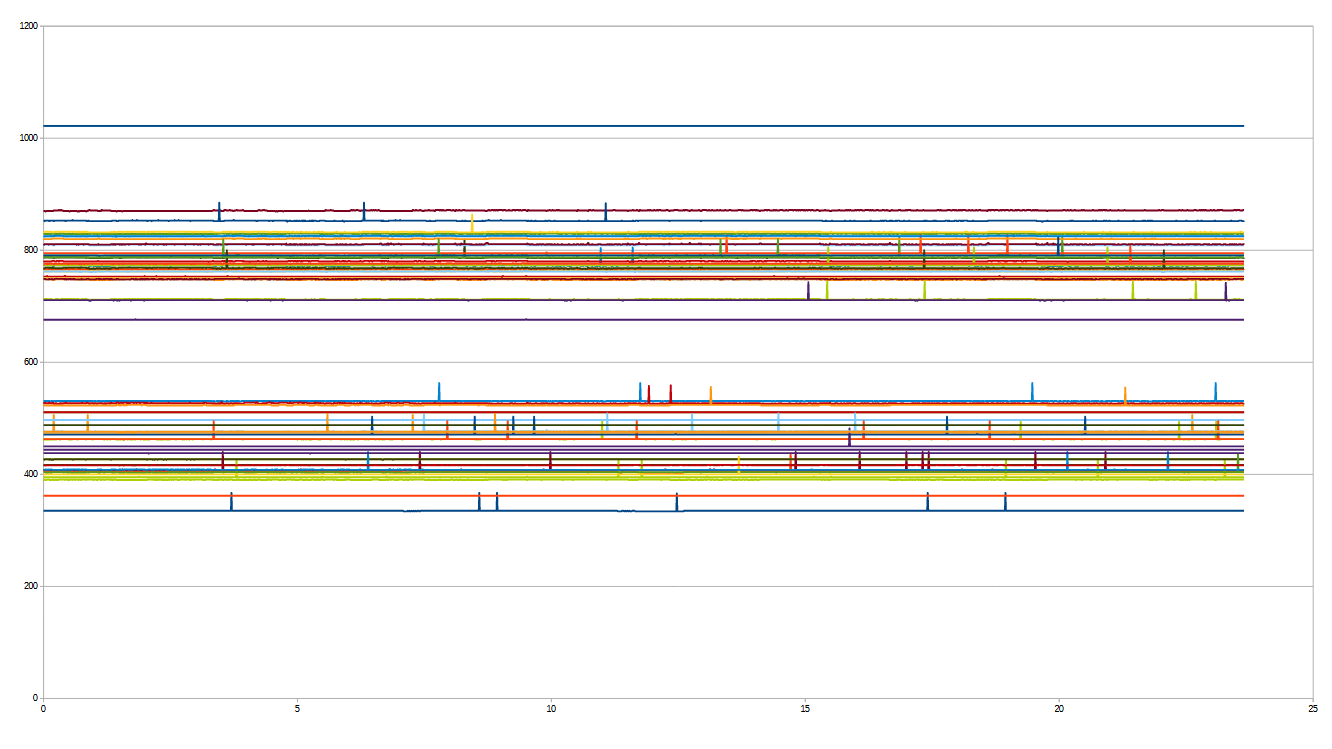
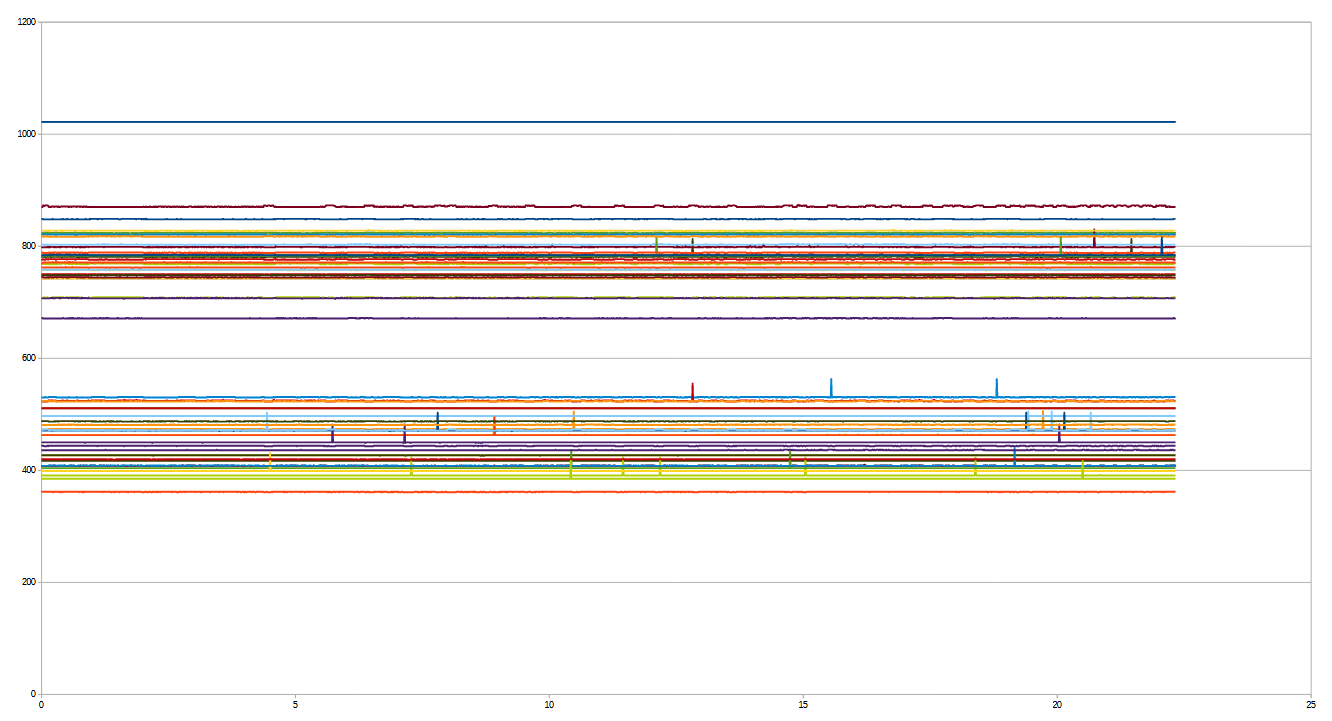
trill_Init(trillSensorTop, 0x30, 4); // is not applied. why??
trill_Init(trillSensorBottom, 0x36, 3);
trill_Init(trillSensorBase, 0x33, 3);
while(!gShouldStop)
{
trillSensorTop.readI2C();
trillSensorBottom.readI2C();
trillSensorBase.readI2C();
}
return 0;
}
int trill_Init(Trill& touchSensor, uint8_t address = 0x33, uint8_t prescaler = 3)
{
std::string deviceName;
int i2cBus = 1;
Trill::Device device = Trill::CRAFT;
Trill::Mode mode = Trill::RAW;
unsigned int speed = 3;
// unsigned int prescaler = 3;
float threshold = 0.0;
printf("Opening device %s on bus %d ", Trill::getNameFromDevice(device).c_str(), i2cBus);
if(255 != address)
printf("at address: %#4x(%d)", address, address);
printf("\n");
if(touchSensor.setup(i2cBus, device, address))
{
fprintf(stderr, "Error while initialising device\n");
return 1;
}
if(touchSensor.setMode(mode) == 0) {
#ifdef VERBOSE
printf("Operation mode set to RAW.\n");
#endif
} else {
fprintf(stderr, "Communication error\n");
return 1;
}
if(touchSensor.setScanSettings(speed) == 0) {
#ifdef VERBOSE
printf("Scan speed set to %d.\n", speed);
#endif
} else {
fprintf(stderr, "Communication error\n");
return 1;
}
usleep(10000);
if(touchSensor.setPrescaler(prescaler) == 0) {
#ifdef VERBOSE
printf("Prescaler set to %d.\n", prescaler);
#endif
} else {
fprintf(stderr, "Communication error\n");
return 1;
}
usleep(10000);
if(touchSensor.setNoiseThreshold(threshold) == 0) {
#ifdef VERBOSE
printf("Threshold set to %d.\n", threshold);
#endif
} else {
fprintf(stderr, "Communication error\n");
return 1;
}
usleep(10000);
if(touchSensor.updateBaseline() != 0) {
fprintf(stderr, "Communication error\n");
return 1;
}
#ifdef VERBOSE
usleep(10000);
touchSensor.printDetails();
#endif
return 0;
}