
hans Furthermore I tried to change the prescaler withtouchSensor.setPrescaler(4) but the raw values does not change.
can you show your code? I suspect you are not sleeping between commands
hans Furthermore I tried to change the prescaler withtouchSensor.setPrescaler(4) but the raw values does not change.
can you show your code? I suspect you are not sleeping between commands
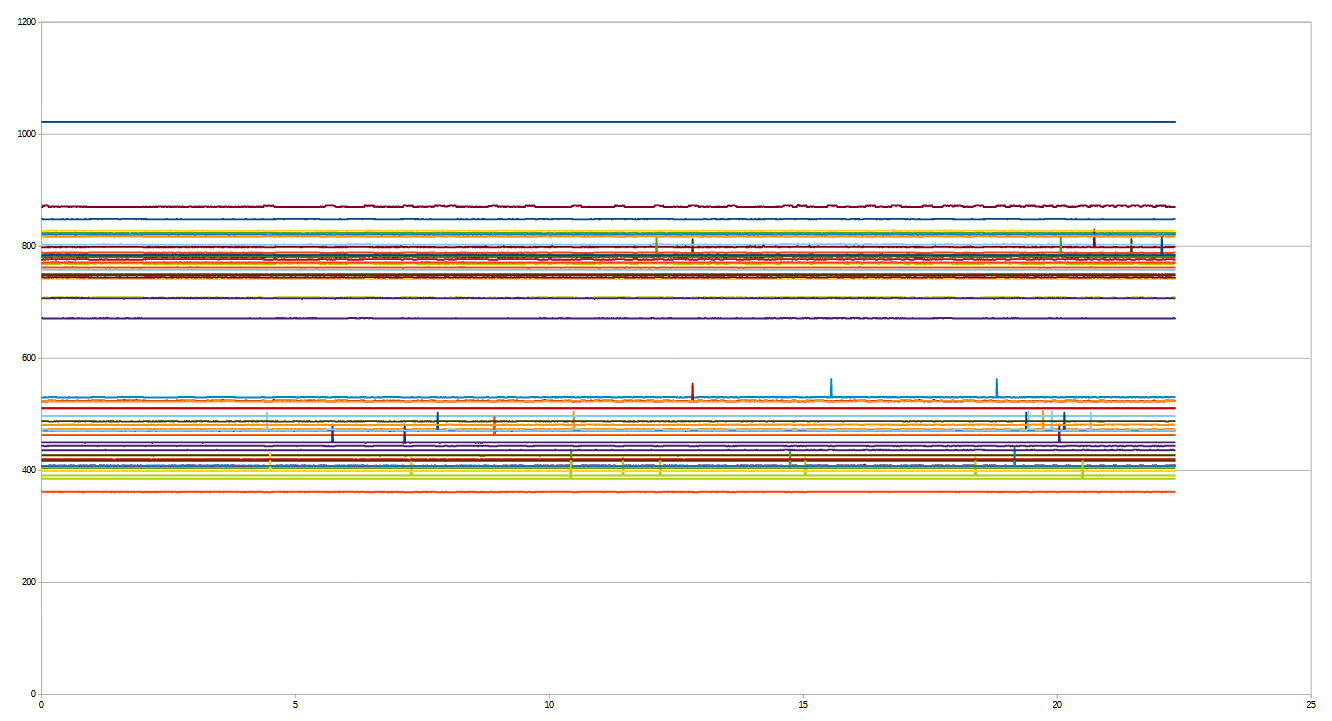
Slightly better but still too much spikes:
My code is basically this:
#define VERBOSE
int main(int argc, char** argv)
{
// Button (GPIO)
if (gpioInitialise() < 0) {
return 1;
}
gpioSetMode(GPIO_START_BUTTON, PI_INPUT);
gpioSetPullUpDown(GPIO_START_BUTTON, PI_PUD_UP);
gpioSetMode(GPIO_TRILL_RESET, PI_OUTPUT);
gpioWrite(GPIO_TRILL_RESET, 1);
usleep(1000);
gpioWrite(GPIO_TRILL_RESET, 0);
// Wait until Trill has finished booting
usleep(600000);
// Trill
trill_Init(trillSensorTop, 0x30, 4); // is not applied. why??
trill_Init(trillSensorBottom, 0x36, 3);
trill_Init(trillSensorBase, 0x33, 3);
while(!gShouldStop)
{
trillSensorTop.readI2C();
trillSensorBottom.readI2C();
trillSensorBase.readI2C();
}
return 0;
}
int trill_Init(Trill& touchSensor, uint8_t address = 0x33, uint8_t prescaler = 3)
{
std::string deviceName;
int i2cBus = 1;
Trill::Device device = Trill::CRAFT;
Trill::Mode mode = Trill::RAW;
unsigned int speed = 3;
// unsigned int prescaler = 3;
float threshold = 0.0;
printf("Opening device %s on bus %d ", Trill::getNameFromDevice(device).c_str(), i2cBus);
if(255 != address)
printf("at address: %#4x(%d)", address, address);
printf("\n");
if(touchSensor.setup(i2cBus, device, address))
{
fprintf(stderr, "Error while initialising device\n");
return 1;
}
if(touchSensor.setMode(mode) == 0) {
#ifdef VERBOSE
printf("Operation mode set to RAW.\n");
#endif
} else {
fprintf(stderr, "Communication error\n");
return 1;
}
if(touchSensor.setScanSettings(speed) == 0) {
#ifdef VERBOSE
printf("Scan speed set to %d.\n", speed);
#endif
} else {
fprintf(stderr, "Communication error\n");
return 1;
}
usleep(10000);
if(touchSensor.setPrescaler(prescaler) == 0) {
#ifdef VERBOSE
printf("Prescaler set to %d.\n", prescaler);
#endif
} else {
fprintf(stderr, "Communication error\n");
return 1;
}
usleep(10000);
if(touchSensor.setNoiseThreshold(threshold) == 0) {
#ifdef VERBOSE
printf("Threshold set to %d.\n", threshold);
#endif
} else {
fprintf(stderr, "Communication error\n");
return 1;
}
usleep(10000);
if(touchSensor.updateBaseline() != 0) {
fprintf(stderr, "Communication error\n");
return 1;
}
#ifdef VERBOSE
usleep(10000);
touchSensor.printDetails();
#endif
return 0;
}hmm the code looks mostly OK, but as you are setting the speed to 3 (SLOW_SPEED), you may have to increase your sleep times in between calls or they may not get processed. This is because scan time - and thus time between reading incoming I2C messages - increases drastically (see here).
I just updated the library so that if you are using a rev C sensor it will automatically wait for acknowledgement and so sleeps may become unnecessary.
Thanks so far. I can test that unfortunately first on monday.
Thanks for the fix in the library. Now the setting of the prescaler works. The setting has never worked, so the Trills ran always at a prescaler=1.
For the problem with the spikes, I did several tests.

Hmm that's an interesting finding... do you have any pull up resistors on the scl and sda lines? The lack of those may be the reason you can't reach higher speed or use multiple devices at the same time
The Raspberry Pi has some on chip and on the Arduino I added external ones.
But it's weird that it works at higher speeds but not at slower. Normally you would assume the opposite.
Who knows what happens when things are out of spec ... I2C specs are either 100kHz or 400kHz. Any other frequency is not guaranteed by specs to work. Do you know the size of the pullups on the Pi? You'll need something like 2k2 if you want to use several devices at once on the bus.
AFAIK these are the maximum frequencies for the appropriate modes.
From https://www.i2c-bus.org/speed/:
The speed grades (standard mode: 100 kbit/s, full speed: 400 kbit/s, fast mode: 1 mbit/s, high speed: 3,2 Mbit/s) are maximum ratings. Compliant hardware guaranties that it can handle transmission speed up to the maximum clock rate specified by the mode.
So all in the specs in my opinion. However, still strage that the clock frequency of the Pi is that much slower than set.
Do you know the size of the pullups on the Pi?
Yes it is something around 2k
hans So all in the specs in my opinion
You may well be right then, it makes sense.
But the thing is Trill is full speed and so should handle up to 400kHz no problem. If you have a scope, you can look at the signal with one or several units connected and see if the edges become excessively smoothed in the latter case, and/or if you see any unexpected ringing.