I've seen some discussions here from some years ago about similar projects. I based myself on them but it doesnt seam to work.
The render.cpp and the _main.pd files are posted on github (https://github.com/ArianaMarta/music-game/).
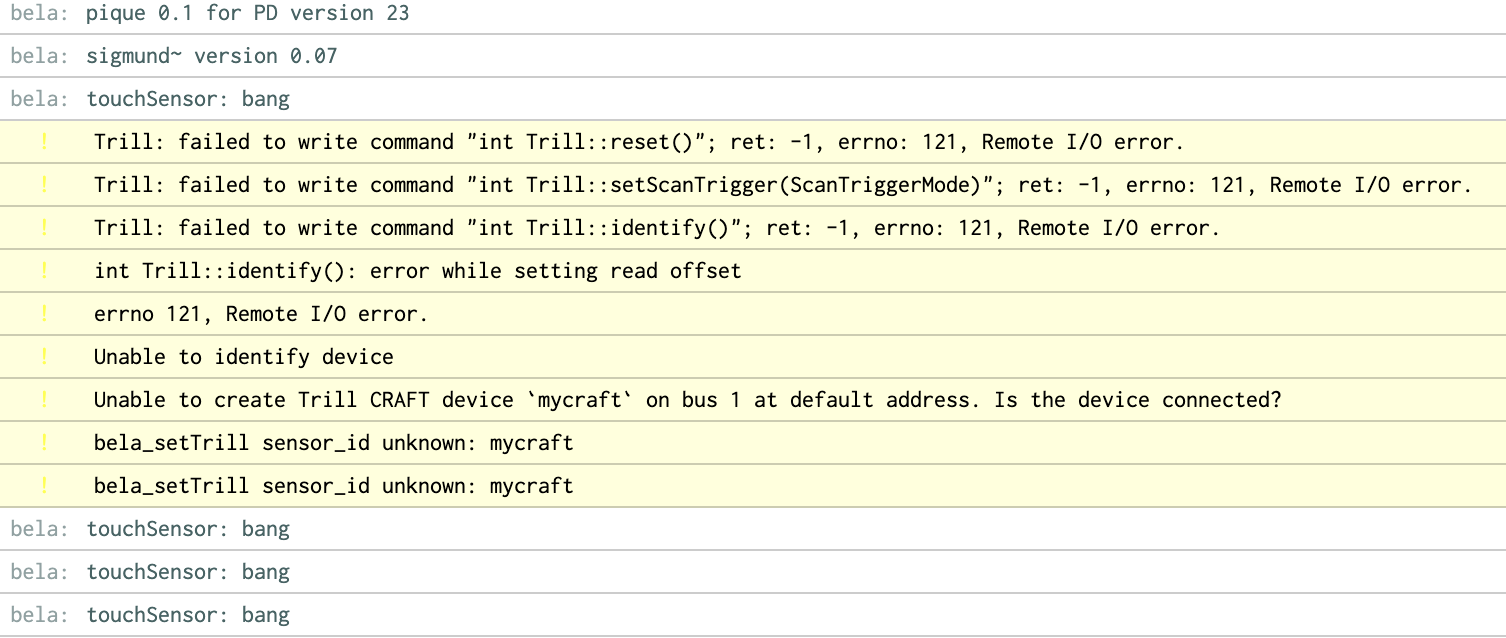
I'm Just using one MPR121 sensor at the moment, and it works when i use the example code so i believe the wiring is correct. I also believe that the pd patch is correct.
What happens is that when i touch the sensor the red LED is constantly on, which means that it gets stuck somewhere so i believe the problem is in the render.cpp file.
Here is the render.cpp:
#include <Bela.h>
#include <cmath>
#include "I2C_MPR121.h"
#include <libraries/libpd/libpd.h>
// How many pins there are
#define NUM_TOUCH_PINS 12
// Define this to print data to terminal
#undef DEBUG_MPR121
// Change this to change how often the MPR121 is read (in Hz)
int readInterval = 50;
// Change this threshold to set the minimum amount of touch
int threshold = 40;
// This array holds the continuous sensor values
int sensorValue[NUM_TOUCH_PINS];
// ---- internal stuff -- do not change -----
I2C_MPR121 mpr121; // Object to handle MPR121 sensing
AuxiliaryTask i2cTask; // Auxiliary task to read I2C
int readCount = 0; // How long until we read again...
int readIntervalSamples = 0; // How many samples between reads
void readMPR121(void*);
bool setup(BelaContext *context, void *userData)
{
if(!mpr121.begin(1, 0x5A)) {
rt_printf("Error initialising MPR121\n");
return false;
}
i2cTask = Bela_createAuxiliaryTask(readMPR121, 50, "bela-mpr121");
readIntervalSamples = context->audioSampleRate / readInterval;
//initialize libpd. This clears the search path
libpd_init();
//libpd_start_message(NUM_TOUCH_PINS); //get data from all 8 MPR121 pins
//libpd_add_float(1.0f);
//libpd_finish_message("pd", "dsp");
return true;
}
void render(BelaContext *context, void *userData)
{
libpd_start_message(12);
for(int n = 0; n < 12; n++){
libpd_add_float(sensorValue[n]);
}
libpd_finish_list("sensorValue");
libpd_finish_message("pd", "dsp");
}
void cleanup(BelaContext *context, void *userData)
{ }
// Auxiliary task to read the I2C board
void readMPR121(void*)
{
for(int i = 0; i < NUM_TOUCH_PINS; i++) {
sensorValue[i] = -(mpr121.filteredData(i) - mpr121.baselineData(i));
sensorValue[i] -= threshold;
if(sensorValue[i] < 0)
sensorValue[i] = 0;
#ifdef DEBUG_MPR121
rt_printf("%d ", sensorValue[i]);
#endif
}
#ifdef DEBUG_MPR121
rt_printf("\n");
#endif
// You can use this to read binary on/off touch state more easily
//rt_printf("Touched: %x\n", mpr121.touched());
}
I'm short in time to finish this project. So if this way doesn't work i was thinking to get the values using arduino (cause that works) and then send them to bela somehow. Any Ideas as well?
Otherwise theres also the option of using 2 trill sensores connected to the same bela. I need exactly 64 capacitive touch inputs.
Thank you