I'm trying to integrate a library for realtime capture of 3D tracking data over the network...I'm starting with the most simple implementation using their library (https://github.com/qualisys/qualisys_cpp_sdk), it seems a little heavy, but maybe later I can trim it down to just the required code.
Anyway during compilation, I'm getting:
'auto' not allowed in lambda parameter column: 92, line: 6046
'auto' not allowed in lambda parameter column: 92, line: 6059
In file /usr/bin/../lib/gcc/arm-linux-gnueabihf/6.3.0/../../../../include/c++/6.3.0/bits/predefined_ops.h: no matching function for call to object of type '(lambda at /root/Bela/projects/2022-09-06_sonification/qsdk/RTProtocol.cpp:6046:82)' column: 16, line: 241
In file /usr/bin/../lib/gcc/arm-linux-gnueabihf/6.3.0/../../../../include/c++/6.3.0/bits/predefined_ops.h: no matching function for call to object of type '(lambda at /root/Bela/projects/2022-09-06_sonification/qsdk/RTProtocol.cpp:6059:82)' column: 16, line: 241
The source code is here: https://github.com/qualisys/qualisys_cpp_sdk/blob/master/RTProtocol.cpp#L6046
And my current render.cpp (WIP) is here:
I'm not new to software, dev, dependency hells and all that, but C++ isn't something I've spent a lot of time with, apart from fixing some obvious bugs and a hello world or two 🙂
Is there something obvious I'm missing?
Edit: Obviously the current render is just an initial setup to test connectivity, but I'm not sure how best to capture the streaming data (and buffering if required) while respecting the realtime render function.
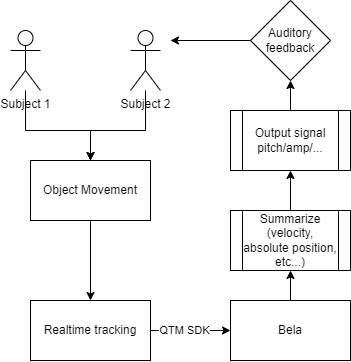
Maybe it will help to outline the entire conecept. I'll do it in text here then upload a little flow diagram in a few minutes.
We want to capture two objects tracked from an experiment, and we can get realtime positional data out from them... those two objects' movements will be sonified to provide auditory feedback to participants. The in parameters (velocity, object "sync" etc) and output params (amplitude, pitch, tempo) are TBD but we will likely try a few options for the experimental pilot to see what works well and is intuitive.
Edit 2: first draft flow diagram
Edit 3: just wanted to mention that I did look up some info first and saw that a) BELA operates in C++ 14 standard (https://learn.bela.io/using-bela/languages/c-plus-plus/#c-and-bela), and b) C++14 is required for generic lambdas (https://stackoverflow.com/questions/48653124/why-is-auto-not-allowed-in-lambda-parameter)